
Project information
- Name: Autonomous Quadcopter and Testbed
- Course: Industrial Project
- Project date: July-Dec 2021
- Project URL: Youtube Video
About
I spearheaded the development of a custom testbed specifically designed for PID tuning and characterizing motor performance. This setup was instrumental in refining control systems, ensuring optimized motor functionality essential for critical applications.
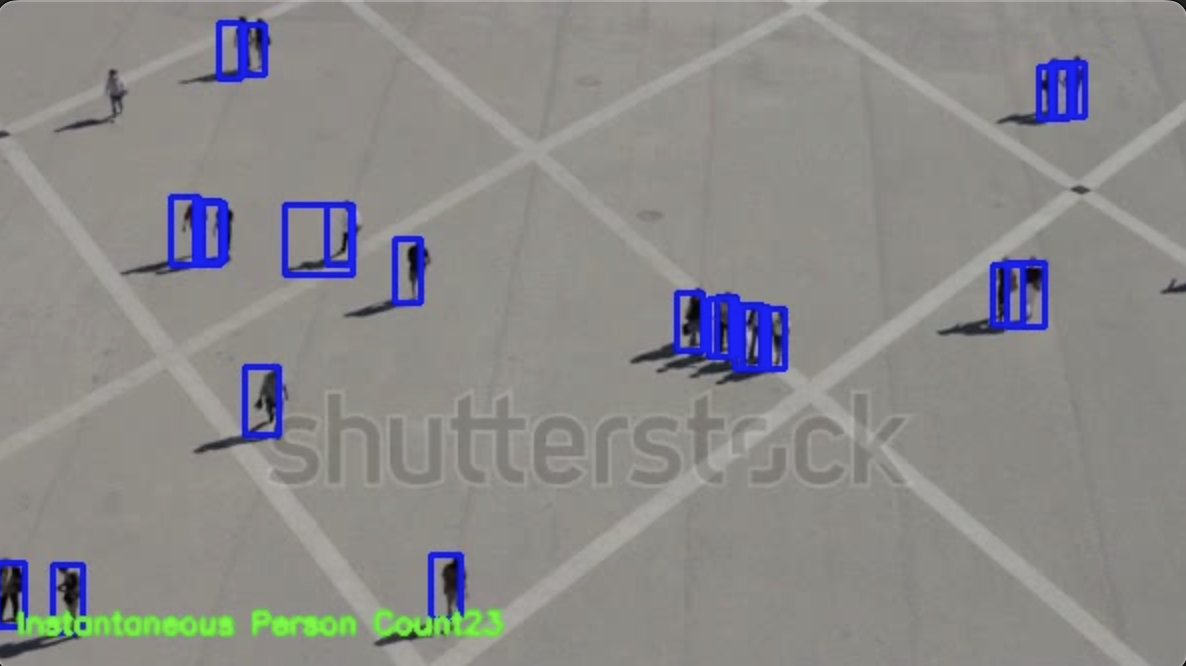
We implemented sensor fusion in an autonomous UAV, achieving unprecedented navigation precision. By synergizing camera and IMU data, the UAV was equipped with enhanced spatial awareness. Further augmenting its capabilities, I integrated a microprocessor that facilitated real-time camera streaming via picamera. This feature was used for real time human detection on a pre-defined path. Thus making it a full fledged Autonomous UAV for Security Surveillance