

Project information
- Name: Autonomous F1 Tenth-Scale Racecar
- Instructor: Prof. Rahul Mangharam
- Project date: Jan-Jun 2024
- Project URL: Github
About
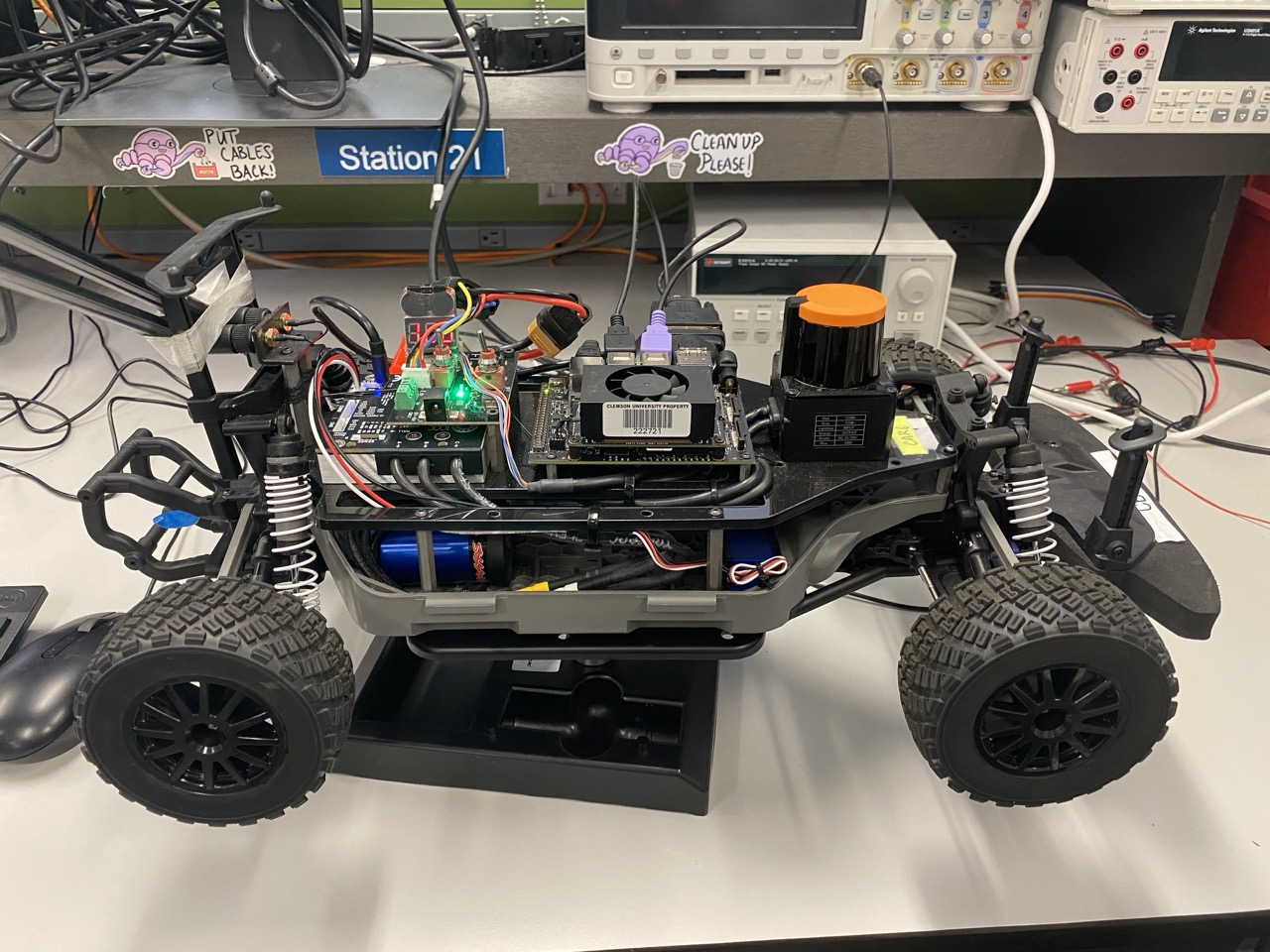
This project highlights the development of a 1/10th scale F1 autonomous racecar, showcasing the integration of advanced control strategies, sensor fusion, and real-time robotics software. The car's design emphasizes high-speed obstacle avoidance and precise trajectory planning, critical for competitive autonomous racing.
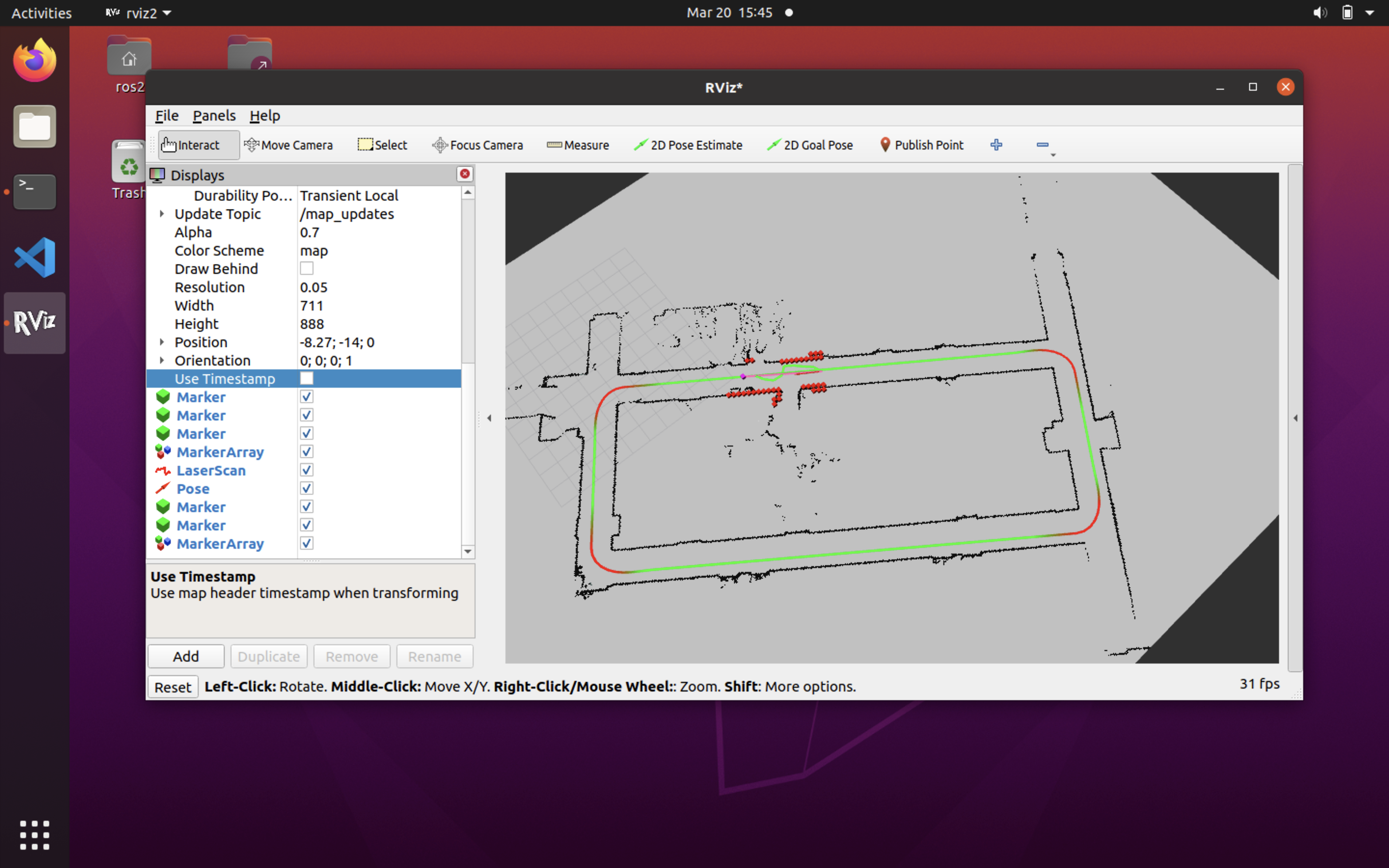
At the core of the vehicle's intelligence is a Model Predictive Control (MPC) system, which leverages sensor data from a 2D LiDAR to create robust local trajectories using cubic splines. This enables the racecar to navigate complex environments with precision and agility.
The car's autonomy is further enhanced by implementing algorithms like Rapidly-exploring Random Tree Star (RRT*) for path planning and Pure Pursuit for tracking the planned path. Additionally, a particle filter-based localization system ensures accurate positioning, while Advanced Driver-Assistance Systems (ADAS) features such as Automatic Emergency Braking contribute to safety.
The entire system is built on the ROS2 framework, enabling modularity and scalability, and allowing for real-time processing and control. This project not only demonstrates the power of cutting-edge robotics technologies but also pushes the boundaries of what autonomous systems can achieve in dynamic, high-speed environments.