
Project information
- Name: Embedded Mobile Robot
- Course: MEAM510 Mechatronics System Design
- Instructor: Prof. Mark Yim
- Project date: Sept-Dec 2023
- Project URL: Github
About
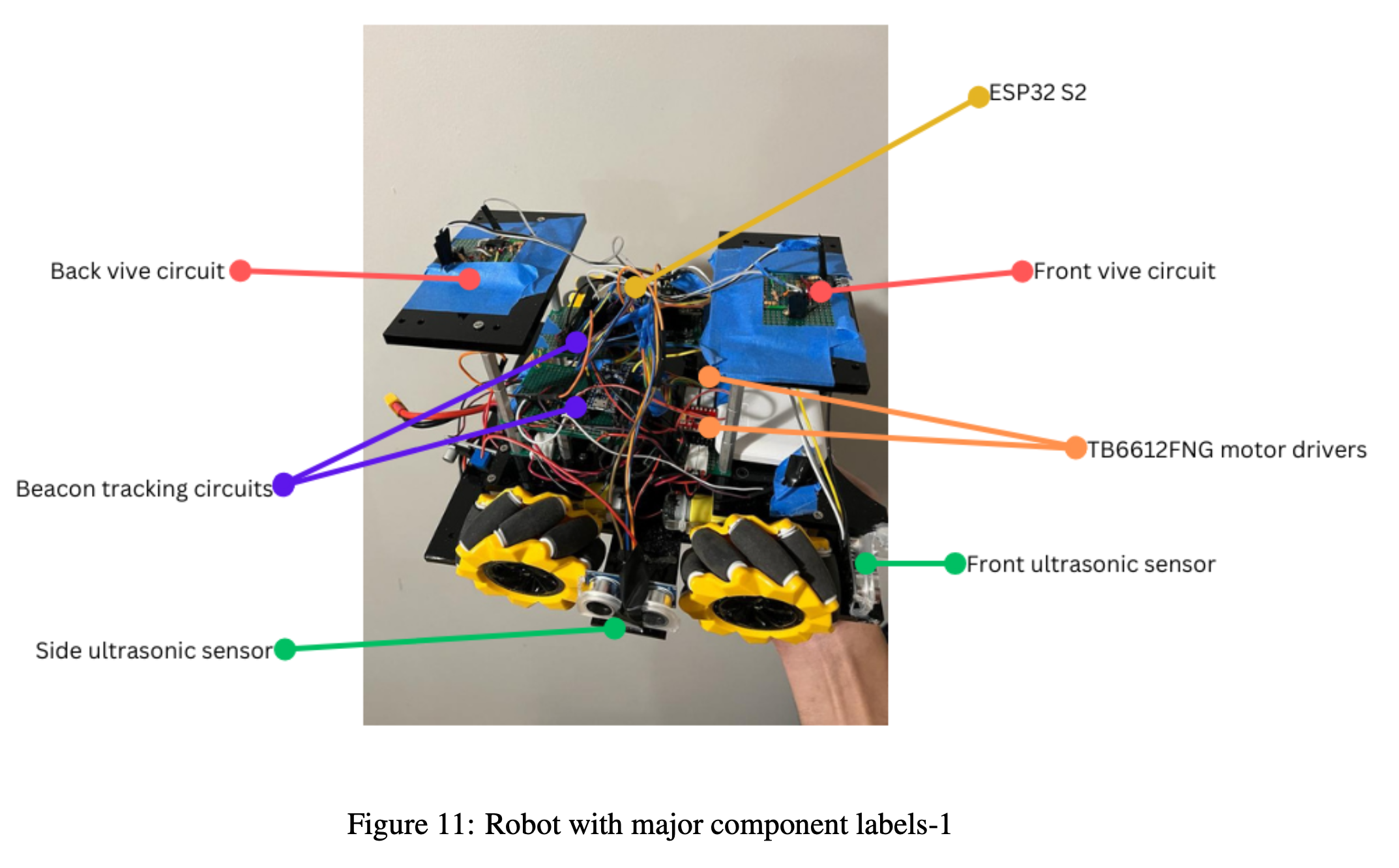
This Project introduces an autonomous mobile robot, showcasing the seamless integration of mechanical design, electronic engineering, and detailed embedded software. A standout feature of this robot is its mecanum wheels, enabling it to move in any direction – essential for its key functions of accurately following walls, tracking beacons, and pushing a model police car.
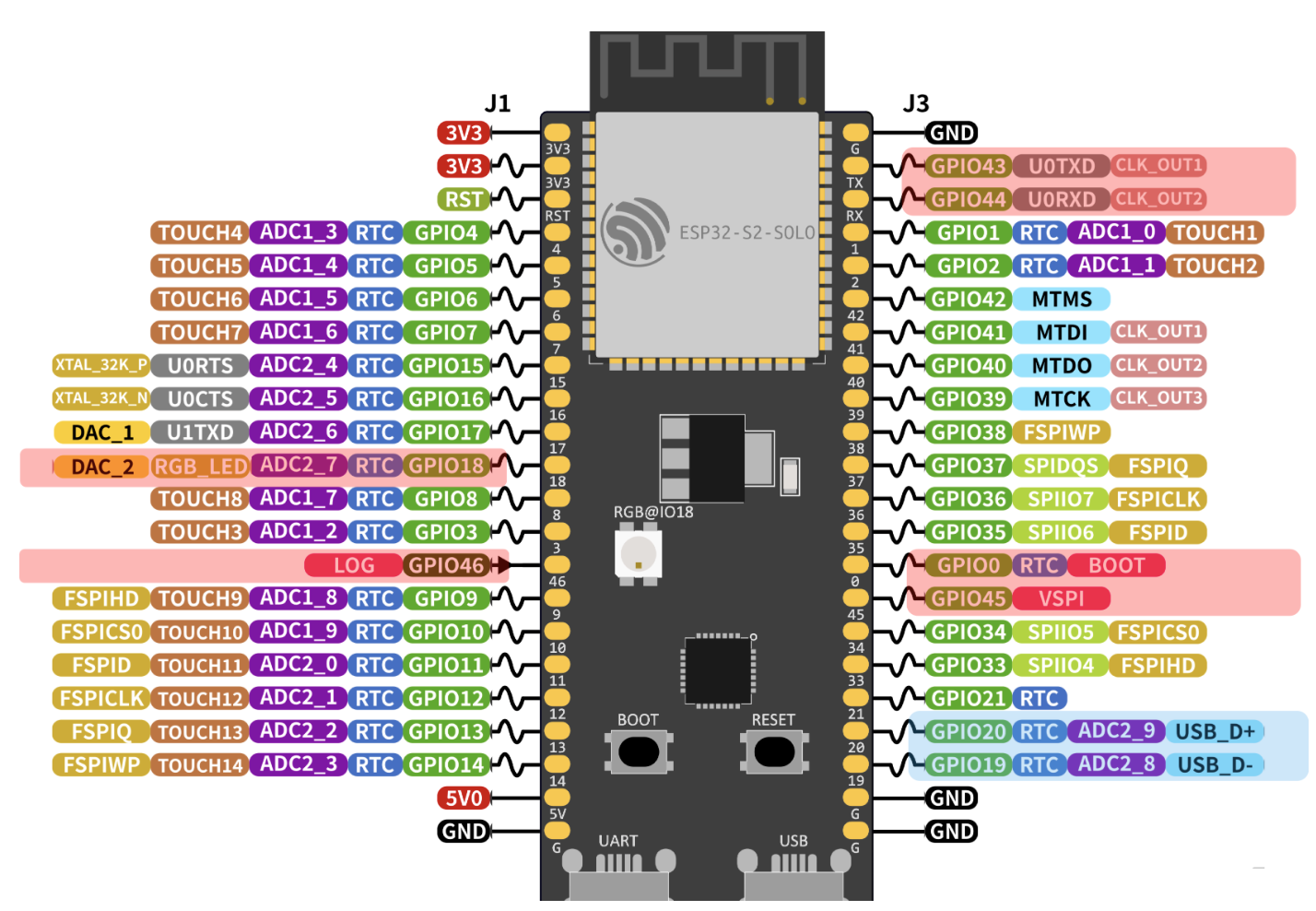
The heart of its electrical system is the ESP32 S2 microcontroller, which expertly controls various elements such as ultrasonic sensors for navigating walls and phototransistors for beacon detection. The robot's embedded system is particularly intricate, featuring WiFi modules for wireless communication and the capability for real-time data processing, crucial for managing its interactions and tasks within its environment.
The embedded software architecture of the robot is central to its functionality. It employs a real-time operating system (RTOS) to efficiently handle multiple tasks concurrently, ensuring the robot operates smoothly and responsively. It incorporates interrupt handling for immediate response to sensor inputs, I2C communication for efficient data transfer between sensors and the microcontroller, and UDP protocols for reliable network communication.
The software is also equipped with PID control algorithms for precise movement and custom algorithms developed specifically for each of the robot's main activities.