
Project information
- Name: Geometric Computer Vision
- Course: CIS580 Machine Perception
- Instructor: Prof. Kostas Danidillis
- Project date: Sept-Dec 2023
- Project URL: Github
About
The Homography Project showcased the implementation of the Direct Linear Transform (DLT) algorithm for homography matrix computation, emphasizing 3D space interpretations and practical applications in image warping and mosaicking, particularly for panorama stitching.
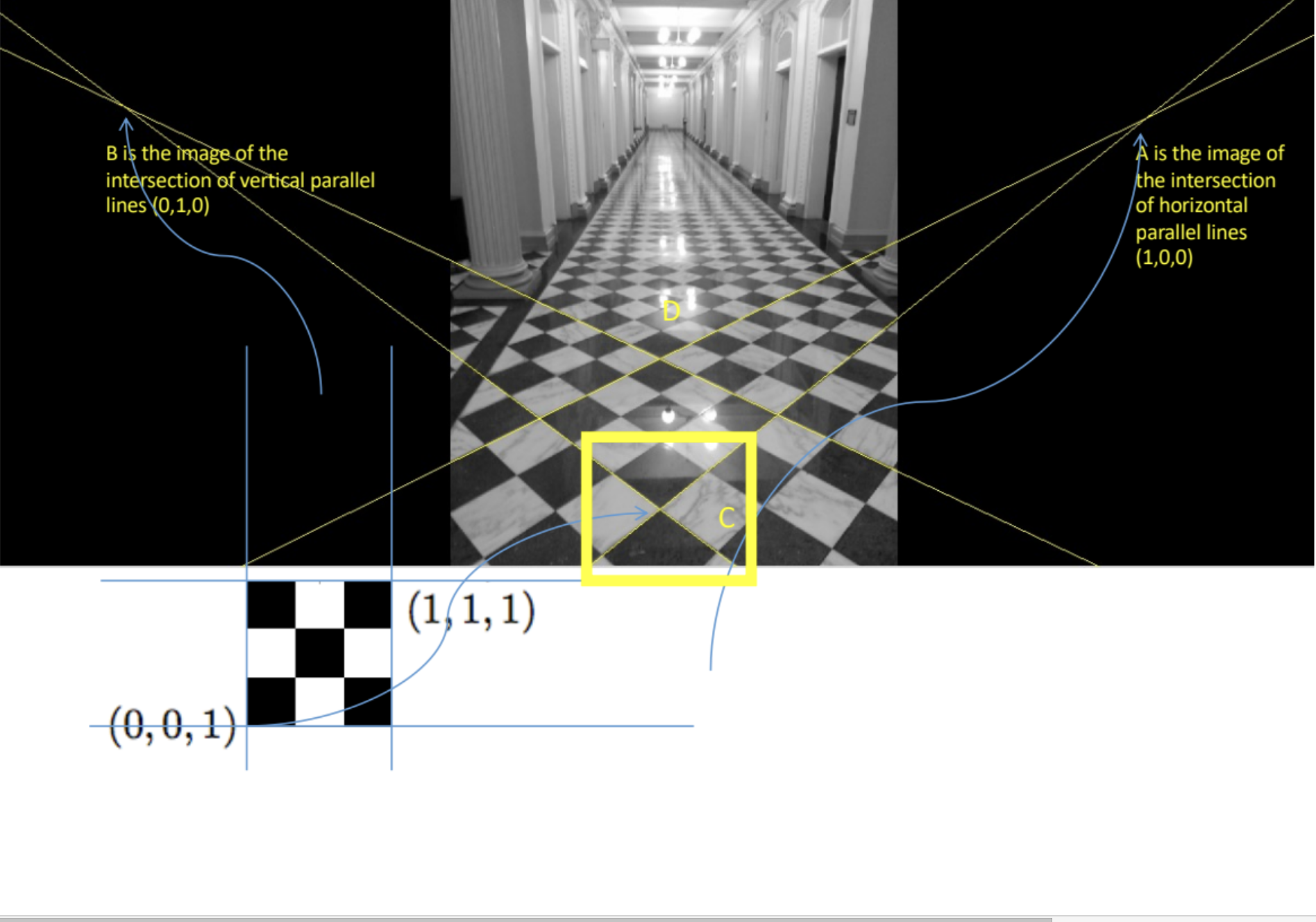
In the Augmented Reality (AR) Project, a world coordinate system was established, with a focus on camera pose estimation using homography and interactive AR elements, culminating in a video integrating virtual objects into real-world settings.
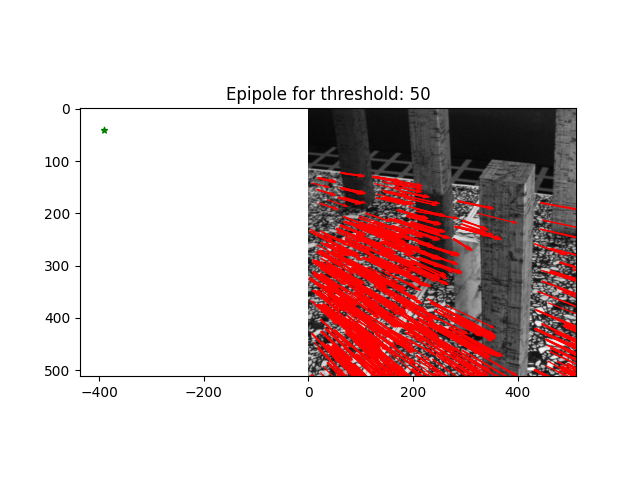
The Epipolar Geometry Project involved computing spatiotemporal derivatives and creating optical flow fields for motion analysis within image sequences, emphasizing depth estimation from optical flow and the understanding of epipolar geometry.
The Structure from Motion (SfM) Project centered on reconstructing 3D scenes from 2D images, featuring essential matrix estimation, RANSAC implementation, epipolar line visualization, camera pose recovery, and the final visualization of the reconstructed scene, demonstrating practical skills in 3D reconstruction and computer vision techniques.