
Project information
- Name: Two View Stereo 3D Reconstruction
- Course: CIS580 Machine Perception
- Instructor: Prof. Kostas Danidillis
- Project date: Nov-Dec 2023
- Project URL: Github
About
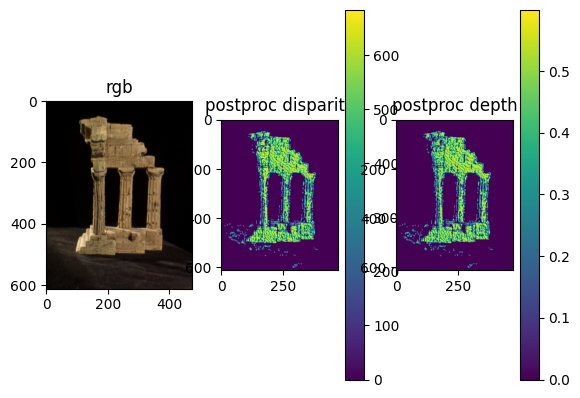
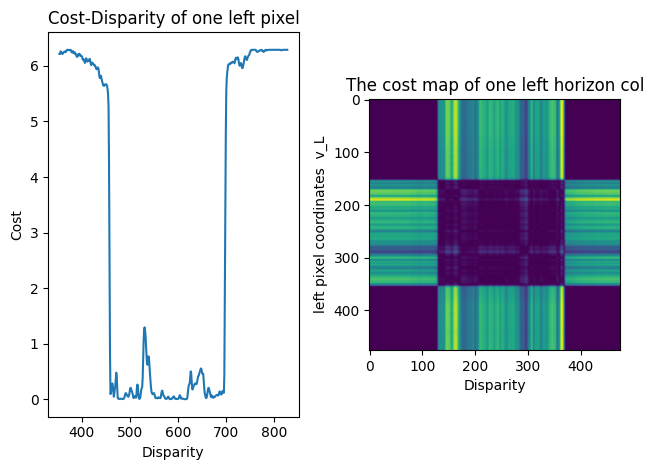
The Two View Stereo Reconstruction project was a venture into 3D scene reconstruction from two stereo images, transitioning from two-dimensional views to a three-dimensional model through a series of intricate processes. It began with camera configuration and coordinate transformation, focusing on aligning the world frame to the camera frame, crucial for comparing different scene viewpoints. Image rectification followed, involving the computation of a rectification rotation matrix for left and right camera views to align them on a common plane, leveraging stereo geometry and camera parameters. A pivotal step was disparity map computation, where image patches were compared using methods like SSD, SAD, and ZNCC, complemented by a Left-Right consistency check for improved disparity accuracy. This led to the generation of a depth map and a point cloud, back-projecting 2D points into 3D space using camera intrinsic parameters and computed disparities. Post-processing included background isolation, depth map cropping, and outlier filtering in the point cloud, followed by transforming it back to the world frame for a coherent 3D scene representation. The project concluded with the visualization and analysis of the depth map and point cloud, underscoring the precision and quality of the reconstruction.